
G’day interested roboticist…
English / Portuguese / Turkish / Spanish / Hebrew / French

Contents: |
This page contains links to YouTube playlists of videos with quality and/or unique examples of many different types of mechanisms, primarily from FIRST Robotics Competition (FRC), but also from other robotics competitions including FIRST Tech Challenge (FTC) and VEX. Each page’s title states the featured mechanisms with a brief description of their use within robotics competitions. The table below each title then has the sub category of the mechanism (e.g. different types of the same mechanism, or different game pieces), some notes about the topic, and a link to the playlist containing videos on that specific mechanism. I will continuously update the playlists as I come across them to expand the variety and quality of the designs for you and your team to learn from. If you have any suggestions for playlist categories, edits, corrections or questions, please feel free to email us through the Contact Us page. I hope this is useful to you and your teams, Luin – Mentor, FRC team 5985 (Project Bucephalus)
Thanks to everyone that helped me edit and improve this document to make it what it currently is, I greatly appreciate it. Notably:
|
Game Piece Examples
The following table details the general size and appearance of certain game pieces in order to give a reference for mechanisms that interest you.
| Game Piece | Image Example | Comp | Game Year | Image Source | ||||
|---|---|---|---|---|---|---|---|---|
| Small Balls <5” |  |
FRC | 2017 | AndyMark | ||||
| Medium Balls 5”-9” |  |
FRC (L) FRC (R) |
2020 (L)
2016 (R) |
FIRST AndyMark |
||||
| Large Balls >9” | 
|
FRC (L) FRC (R) |
2019 (L)
2014 (R) |
FIRST
FIRST |
||||
| Cubes |
|
FRC (L)
VEX(R) |
2018 (L)
2019-20 (R) |
MindGear | ||||
| Frisbees and Rings |
|
FTC (L) VEX (R) |
2019-20 2017-2018 |
FIRST | ||||
| Gears | 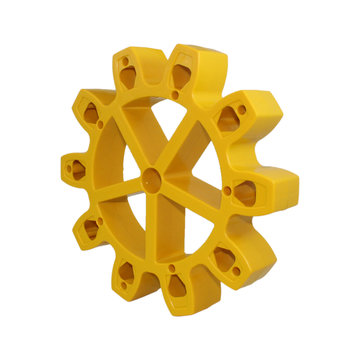 |
FRC | 2017 | AndyMark | ||||
| Poles |  |
FTC | 2019-20 | AndyMark | ||||
| Cones |  |
VEX | 2017-18 | VEX | ||||
| Totes (yellow) and Cans (green) |   |
FRC | 2015 | FIRST | ||||
| Inner Tubes | FRC | 2011 | FIRST | |||||
| Other |  |
FRC | 2019 | AndyMark | ||||







Drivetrains
The drivetrain is the most important part of a robot, as it allows you to at least play defense and push game pieces towards your team. Without it you wouldn’t be able to drive anywhere on the field! The stock drivetrain that comes with the Kit of Parts for FRC teams is quite reliable, however to achieve certain design goals teams may need to use either a different off the shelf drivetrain or design their own.
| Drivetrain Type | Notes | Link |
|---|---|---|
| West Coast Drive | The West Coast Drive (WCD) is the most common ‘custom’ drivetrain seen in FRC. It usually consists of 6 wheels cantilevered from the frame and provides a lot of pushing power. The cantilevered wheels allow for more internal space within the robot for mechanisms, more flexible configurations, and improved maintainability. | Link |
| Mecanum | A mecanum drive is rather standard in robotics competitions with smaller robots like FTC and VEX, where defence isn’t such a core component of the game. It allows for multi directional movement with 4 specialised wheels that have independent rollers on an angle that free spin. Pushing power is lost with this type of drivetrain, making you extremely prone to defence. Teams like FRC 1986 attempted to combat this by using 8 mecanum wheels. Drivers must be skilled and auto paths thoughtfully chosen to make the most of this drive type. | Link |
| Swerve | Swerve drive is a complex drivetrain type where the wheels not only rotate to propel the robot, but are also able to pivot independently of one another on the spot. This allows for a robot to still maintain much of the pushing power of a WCD while being able to produce multidirectional movement. COTS (Commercial Off The Shelf) options are available from several FRC vendors, and some example code is available, but swerve remains an expensive and lengthy investment for an FRC team. Drivers must be skilled and auto paths thoughtfully chosen to make the most of this drive type. | Link |
| H Drive | H drive is a special type of drivetrain that utilises the mechanic of an Omni wheel which consists of rollers that free spin perpendicular to the direction of the whole wheels rotation. This means that with 5 omni wheels in a H set up allow for multi directional movement, allowing for sick powerslides at the expense of pushing power (if they can catch you). Drivers must be skilled to make the most of this drive type. | Link |
| Other Holonomic | Holonomic is the collective name for drivetrains that can move in multiple directions without having to physically rotate the chassis of the robot. For example driving forwards and then driving left – without changing the direction the front of the robot is facing. Some other holonomic drives include, Kiwi Drive, Butterfly Drive, and Differential Swerve Drive. | Link |
| Obstacle Overcoming | In the FRC games from 2010 and 2016, there were obstacles on the field that sometimes required a special type of drivetrain to assist overcoming them. | Link |
| File Card | In the 2002 FRC game teams could earn points by pushing mobile goals down to the opponent’s side of the field. Team 71 used pairs of file cards to walk/march down the field with the treads moving similarly to an elliptical machine. However, such a technique is illegal and immortalised under the rule “Traction devices must not have surface features that could damage the ARENA (e.g. metal, sandpaper, hard plastic studs, cleats, hook-loop fasteners or similar attachments).” | Link |
| No Drivetrain | Generally not feasible | Link |
Intakes
Intakes are the mechanism on a robot designed to acquire the game piece from the field. This is typically the second most common mechanism on a robot because almost every competition will have something that your robot will have to pick up and manipulate.
| Game Pieces | Notes | Link |
|---|---|---|
| Small and Medium Balls | Small and medium balls have been grouped together, as similar collection mechanisms are used to retrieve these types of game pieces. | Link |
| Large Balls | Large balls have their own playlist as they generally behave differently to small and medium balls and thus require their own procurement mechanism. | Link |
| Cubes | Cubes are quite common and have been seen across different robotics competitions in recent years, most notably the 2018 FRC game ‘Power Up’. | Link |
| Frisbees/Rings | Frisbees and rings behave in similar ways and have been manipulated in the same way (FRC 2013 vs FTC 2020-21). | Link |
| Hatch Panels | Hatch panels are a unique game piece and thus require their own playlist. | Link |
| Gears | Gears (the FRC 2017 game piece) are also extremely unique and require their own playlist, however some of the collection methods may be applied to objects such as frisbees, rings, and hatch panels. | Link |
| Poles | Poles have been seen only recently in FTC 2020-21 in the wobble goal game piece. | Link |
| Cones | Cones were the primary game piece in the 2018 VEX Robotics Competition game ‘In the Zone’. In the 2022-23 FTC and 2023 FRC games, a cone game piece was also used, with the FTC cone being hard plastic with a round base and the FRC cone ressembling a small traffic cone. | Link |
| Totes and Cans | These were the game pieces in the 2015 FRC game ‘Recycle Rush’. The unique nature of these game pieces grants them their own playlist. | Link |
| Inner Tubes | Seen in multiple FRC games, inner tubes are sure to make a reappearance at some stage in the future. | Link |
Indexers
Indexers are mechanisms used to manipulate the game pieces once they are already under the robot’s control. This could be sorting the game pieces or moving them to another mechanism such as a shooter or other scoring system.
| Game Pieces | Notes | Link |
|---|---|---|
| Small and Medium Balls | Small and medium balls are generally treated the same as far as indexing is concerned. When multiple game pieces are able to be controlled by a robot, indexing is required to move the balls to the scoring mechanism. Small and medium balls have historically been indexed in similar ways. For example: Basketballs in the 2012 FRC game ‘Rebound Rumble’, Fuel in the 2017 game ‘Steamworks’ and Power Cells in the 2020 and 2021 game ‘Infinite Recharge’. | Link |
| Large Balls | One phenomenal example of indexing large balls is 254’s robot for the 2014 FRC game ‘Aerial Assist’. Indexing, although not required by any means, allowed for 254 to have an excellent advantage in Auto. | Link |
| Cubes | Cubes don’t necessarily require indexing (like Power Cubes in the 2018 FRC game ‘Power up’), although some teams have designed mechanisms with a hand off from the intake to the scoring mechanism. However, other games like the 2017-18 FTC game ‘Relic Recovery’ did require the Glyphs to be indexed as order of the cubes was required to score. | Link |
| Frisbees/Rings | In both the FRC 2013 game ‘Ultimate Ascent’ and the 2020-21 FTC game ‘Ultimate Goal’, multiple game pieces could be controlled by a robot, meaning the game piece, a frisbee and a ring respectively, required indexing. | Link |
| Totes and Cans | Totes in the 2015 FRC game ‘Recycle Rush’ had to be indexed so that they could be stacked one on top of the other to maximise scoring. | Link |
Lifts
In all robotics competitions, it is nearly guaranteed that you’ll have to lift something. Whether it be a game piece or your robot itself depends on the game, but there are multiple ways that lifting things can be achieved.
| Lift Type | Notes | Link |
|---|---|---|
| Arm | An arm is probably one of the simplest ways to get something off the ground, and it is extremely reliable when built correctly. This playlist has examples of robots with all different types of arms ranging from single axis to double reverse four bars. There are a lot of designs to look at and pick from! | Link |
| Elevator | Elevators are one of the quickest and strongest ways to lift in robotics competitions. They are generally made with 2 frames that slide within each other to extend upwards while still being strong and stable. There are many great examples in this playlist, from fairly simple elevator designs to super complex designs with internal rigging. | Link |
| Linear Extension | Linear extensions are similar to elevators in their job (an elevator is a type of linear extension) however they can be more or less complex depending on the design. Simple pneumatic extensions that have 2 positions are fairly simple, whereas a rigged system could be extremely complex. | Link |
| Arm + Elevator Combination or Pink Arm | This configuration can be chosen when there is a particular range of motion desired for completing one or multiple game tasks with one lifter. The combination of two simple lift mechanisms results in greater software and engineering complexity, but allows for very unique possibilities. | Link |
Extra Note:
There are two main types of rigging that can be applied to elevators and linear extensions, these are:
- Cascade
- Continuous
Cascade elevators are rigged in a way so that all the stages move up simultaneously, whereas Continuous elevators are rigged such that the final stage goes up first, then the second last stage and so on. Then they go back down in the reverse order.
More information about elevator rigging: https://www.slideshare.net/oregonfirst/firstfare-2012-manipulators
Shooters
Shooters have been a core component of robotics competitions for as long as the latter has existed. A shooter serves one core purpose: to score game pieces from a distance. Included separately from the game piece specific shooting mechanisms are the hooded shooters, as they are a general design that has been and can be used for all size balls.
| Game Pieces | Notes | Link |
|---|---|---|
| Small Balls | Small balls are lighter and usually held at a higher volume (requiring a faster shooter than medium or large balls), thus they have been separated from the medium balls for this mechanism. Shooting high quantities of balls is a difficult challenge whose solutions involve tradeoffs between ball capacity, shooting accuracy, shots per second, and the other functions on your robot. | Link |
| Medium Balls | Medium balls are often shot at lower fire rates than small balls, and sometimes only one can be controlled by a robot at a time (2016 FRC game ‘Stronghold’), which lends itself to different designs than that of a higher volume shooter required for smaller balls. | Link |
| Large Balls | Large balls have been shot in many games pre 2015, but haven’t yet seen a return. There are many approaches to shooting large projectiles which can be seen in the variety of designs in the playlist. | Link |
| Cubes | Cubes have generally been lifted and delivered by most robots, however a select few teams solved the design challenge by shooting the cube shaped game pieces into the scoring area. | Link |
| Frisbees/Rings | Frisbees and rings are both similar in shape and therefore are shot in extremely similar ways, as seen from the designs used in the 2013 FRC game and the 2020-21 FTC game. | Link |
| Nerf Dart Looking Thing | I found an animation of a mechanism that I thought was really cool and so added an entire playlist for it. Who knows, one day we might be shooting foam tubes of some description (pool noodles???) | Link |
| Hooded Shooters (not a game piece, but a type of shooter) | This playlist consists of robust and well designed hooded shooters, which are used to change the exit angle of the projectile to allow for scoring from multiple positions. | Link |
For more information on shooter design:
Climbers
In FRC, it is extremely common for the endgame condition to require a climb of some description to achieve it. In the years since 2015, robots have had to climb ropes, bars, platforms, and sometimes even traverse along the bar (2020 FRC game to keep level) to meet the condition. Each type of climb has many solutions to it, thus the need for a playlist for each type of endgame climb. There are also teams that design and build climbing mechanisms that go beyond the single robot requirement, and assist other robots or carry other robot/s with them to meet the endgame condition. These are assistive climbs (also called buddy climbs).
| Endgame Climb Type | Notes | Link |
|---|---|---|
| Rope | Ropes were used in the 2017 FRC game ‘Steamworks’. Robots had to scale the rope and activate a pressure pad to meet the endgame condition. | Link |
| Bar | Bars have been used extensively in FRC as an object that robots must climb from to meet endgame conditions. Since 2015, a bar was a part of the endgame challenge for FRC in 2016, 2018, 2020, and 2021. | Link |
| Platform | A platform was the main endgame obstacle for robots in the 2019 FRC game ‘Destination Deep Space’. Robots had 2 different heights that they could climb onto to score differing amounts of points. | Link |
| Bar Traversal | In the 2020 and 2021 FRC game ‘Infinite Recharge’ an endgame condition that provided extra points, and potentially the boost required to gain a precious RP, was that the bar your alliance was hanging from had to be level. Some teams designed and built a robot that could traverse along the bar in order to balance out the other robot on the other side of the bar to meet that bonus endgame condition. | Link |
| Assistive/Buddy | Some teams in FRC have gone above and beyond throughout the years to assist their alliance in achieving maximum endgame points and/or a precious RP. These robots have been designed to lift other robots above a threshold to allow the bonus endgame condition to be met. | Link |
Ones Without Categories
These are mechanisms that didn’t fit well into one of the above playlists, as they were too different from other mechanisms to be grouped with them.
| Mechanism | Notes | Link |
|---|---|---|
| Turrets | This playlist consists of mostly turreted shooters, which rotate separately from the drivebase, allowing for the robot to aim at the target without the need for aligning the drivebase with the target. It also includes other turreted mechanisms like 254’s robot for the 2019 FRC season ’Destination Deep Space’ | Link |
| Suction | Although extremely rare, suction and vacuum power have been used across some robotics competitions, most notably FRC 2019 game ‘Destination Deep Space’ for climbing the platform, and controlling game pieces (with varying success). | Link |
| Game Specific | There are many games that have specific mechanics that we haven’t seen again. These required specific mechanisms that don’t fit into any other category. | Link |
| Unique Mechanisms | These are videos of mechanisms that do fit into other playlists but are just so unique they deserve their own. | Link |