
Falaí, caro robotiquer…
English / Portuguese / Turkish / Spanish / Hebrew / French

Conteúdo: |
Esta página contém links para playlists do YouTube de qualidade e/ou exemplos únicos de vários tipos diferentes de mecanismos, originalmente da FIRST Robotics Competition (FRC), mas também de outras competições de robótica, incluindo a FIRST Tech Challenge (FTC) e VEX. Cada título de cada página menciona seu mecanismo característico com uma vaga descrição de seu uso nas competições de robótica. A tabela abaixo de cada título terá então a subcategoria de cada mecanismo (ex: diferentes tipos de um mesmo mecanismo, ou diferentes peças de jogo), algumas anotações sobre o tópico, e um link para uma playlist contendo vídeos no mecanismo específico. Eu espero que isso seja útil para vocês e seus times, Luin – Mentor, Time de FRC 5985 (Project Bucephalus)
Muito obrigado a todos que me ajudaram a editar e melhorar este documento para fazê-lo o que é hoje, sou muito grato. Notavelmente:
|
Exemplos de peça de jogos
A seguinte tabela detalha o tamanho e aparência gerais de certas peças de jogo, com objetivo de dar uma referência para mecanismos que te interessem
| Peça de Jogo | Exemplo de Imagem | Competição | Ano do Jogo | Fonte da Imagem | ||||
|---|---|---|---|---|---|---|---|---|
| Bolas Pequenas <5” |  |
FRC | 2017 | AndyMark | ||||
| Bolas Médias 5”-9” |  |
FRC (L) FRC (R) |
2020 (L)
2016 (R) |
FIRST AndyMark |
||||
| Bolas Grandes >9” | 
|
FRC (L) FRC (R) |
2019 (L)
2014 (R) |
FIRST
FIRST |
||||
| Cubos |
|
FRC (L)
VEX(R) |
2018 (L)
2019-20 (R) |
MindGear | ||||
| Frisbees e Anéis |
|
FTC (L) VEX (R) |
2019-20 2017-2018 |
FIRST | ||||
| Engrenagens | 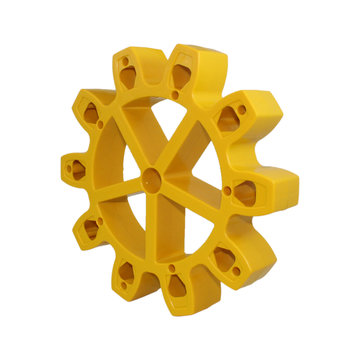 |
FRC | 2017 | AndyMark | ||||
| Polos |  |
FTC | 2019-20 | AndyMark | ||||
| Cones |  |
VEX | 2017-18 | VEX | ||||
| Caixas (amarelo) e Latas (verde) |   |
FRC | 2015 | FIRST | ||||
| Tubos internos | FRC | 2011 | FIRST | |||||
| Outros |  |
FRC | 2019 | AndyMark | ||||







Sistema de direção
O sistema de direção é a parte mais importante do robô, por te permitir ao menos jogar na defensiva e empurrar as peças de jogo para o seu time. Sem ele, você não poderia dirigir a lugar nenhum no campo! O sistema de direção que vem com o Kit of Parts para times FRC é bastante confiável, mas, para atingir certos objetivos de design, times precisarão ou usar um sistema de direção disponível pra venda ou montar o seu próprio.
| Tipo de Chassis | Anotações | Link |
|---|---|---|
| West Coast Drive | O West Coast Drive (WCD) é o sistema de direção ‘personalizado’ mais visto no FRC. Ele normalmente consiste de 6 rodas projetadas do perímetro da estrutura e fornece bastante impulso. As rodas projetadas permitem mais espaço interno dentro do robô para mecanismos, mais configurações flexíveis e manutenção facilitada. | Link |
| Mecanum | O Mecanum drive é meio que padrão em competições de robótica com robôs menores, como FTC e VEX, onde defesa não é um componente principal do jogo. Ele permite direção multidirecional com 4 rodas especializadas que possuem mancais independentes em um ângulo com rotação livre. Impulso é perdido com esse tipo de sistema de direção, te fazendo mais vulneráveis à defesa. Times como FRC 1986 tentaram combater isso usando 8 rodas mecanum. Motoristas devem ser hábeis e caminhos autônomos cuidadosamente escolhidos para aproveitar ao máximo esse tipo de sistema de direção. | Link |
| Swerve | Swerve drive é um sistema de direção complexo onde não só as rodas giram para mover o robô, mas também pivotam independentemente de cada uma em seus lugares. Isso permite o robô manter seu impulso igual ao de um WCD enquanto produz movimento multidirecional. Opções COTS (“comerciais de prateleira”) estão disponíveis em vários revendedores FRC, e alguns códigos de exemplo estão disponíveis, mas o serve continua sendo um investimento caro e longo para um time FRC. Motorista devem ser hábeis e caminhos autônomos cuidadosamente escolhidos para aproveitar ao máximo esse tipo de sistema de direção. | Link |
| H Drive | H Drive é um tipo especial de sistema de direção que utiliza a mecânica de uma roda Omni, que consiste de eixos que giram livremente, perpendicular à direção da rotação das outras rodas. Isso significa que, com 5 rodas Omni em uma configuração H, isso permite um movimento multidirecional, além de deslizes irados as custas do impulso (se eles conseguirem pegar você). Motoristas precisam ser hábeis para aproveitar ao máximo esse tipo de sistema de direção. | Link |
| Holonômico | Holonômico é o nome coletivo para sistema de direção que podem se mover em várias direções sem ter que mover fisicamente o chassi do robô. Como exemplo, dirigir para frente e virar à esquerda – sem mudar a direção que a parte da frente do robô está virada. Outros sistemas de direção holonômicos incluem o Kiwi Drive, Drive Borboleta e Swerve Drive Diferencial. | Link |
| Pula-Obstáculos | Nos jogos FRC de 2010 e 2016, haviam obstáculos no campo que de vez em quando precisavam de um tipo especial de sistema de direção para atravessá-los. | Link |
| Placas de Lixa | No jogo de FRC de 2002, times podiam conseguir pontos empurrando gols móveis para o lado do oponente no campo. O time 71 usou pares de placas de lixas para andar/caminhar o campo com trilhos movendo parecido com uma máquina elíptica. Porém, essa técnica é ilegal e imortalizada na regra “Aparelhos de tração não devem ter aspectos de superfície que possam danificar a arena (ex: metal, lixa, pontas duras de plástico, travas, fitas de velcro ou acessórios semelhantes)” | Link |
| Sem Chassis | Geralmente pouco interessante | Link |
Intake
Intake é o mecanismo de um robô planejado para receber as peças de jogo do campo. Isso é tipicamente o segundo mecanismo mais comum porque quase toda competição vai ter alguma coisa que seu robô precisará pegar e manusear.
| Peças de Jogo | Anotações | Link |
|---|---|---|
| Bolas Pequenas e Médias | Bolas pequenas e médias são geralmente tratadas da mesma forma considerando o indexador. Quando várias peças de jogo são capazes de serem controladas por um robô, indexação é necessária para mover as bolas para o mecanismo de pontuação. Bolas pequenas e médias, historicamente, têm sido indexadas da mesma forma. Exemplos: Bolas de basquete no jogo de FRC de 2012 ‘Rebound Rumble’, combustível no jogo de FRC de 2017 ‘Steamworks’ e Células de Poder no jogo de FRC de 2020 ‘Infinite Recharge’. | Link |
| Bolas Grandes | Bolas grandes têm sua própria playlist já que geralmente se comportam diferentemente das bolas pequenas e médias, portanto requerem seu próprio mecanismo de captura. | Link |
| Cubos | Cubos são bastante comuns e têm sido em várias competições de robótica diferentes em anos recentes, mais notavelmente no jogo de FRC de 2018 ‘Power Up’. | Link |
| Frisbees/Anéis | Frisbees e anéis se comportam de forma semelhante e têm sido manipulados da mesma forma (FRC 2013 e FTC 2020-21) | Link |
| Painel acoplável | Painéis acopláveis são uma peça única de jogo e, portanto, requerem sua própria playlist. | Link |
| Engrenagens | Engrenagens (peça do jogo de FRC de 2017) são também bastante únicas e requerem sua própria playlist, porém alguns dos métodos podem ser aplicados a objetos como frisbees, anéis e painéis acopláveis. | Link |
| Polos | Polos foram apenas vistos recentemente nos jogos de FTC 2020-21 na peça de jogo do gol móvel | Link |
| Cones | Cones foram a peça de jogo primária no jogo VEX Robotics Competition de 2018 ‘In The Zone’. A coisa mais perto de um cone que não seja essas peças de jogo seria o tetraedro no jogo de FRC de 2005 ‘Triple Play’ | Link |
| Caixas e Latas | Essas foram as peças de jogo do jogo de FRC de 2015 ‘Recycle Rush’. A natureza única dessas peças de jogo lhes garante sua própria playlist | Link |
| Tubos internos | Visto em múltiplos jogos de FRC, tubos internos com certeza farão uma reaparição em algum momento no futuro. | Link |
Indexadores
Indexadores são mecanismos usados para manipular as peças de jogo uma vez que elas já estão sob controle do robô. Isso pode estar organizando as peças de jogo ou movendo-as para outro mecanismo como o atirador ou outro sistema para pontuação.
| Peças de Jogo | Anotações | Link |
|---|---|---|
| Bolas Pequenas e Médias | Bolas pequenas e médias são geralmente tratadas da mesma forma considerando o indexador. Quando várias peças de jogo são capazes de serem controladas por um robô, indexação é necessária para mover as bolas para o mecanismo de pontuação. Bolas pequenas e médias, historicamente, têm sido indexadas da mesma forma. Exemplos: Bolas de basquete no jogo de FRC de 2012 ‘Rebound Rumble’, combustível no jogo de FRC de 2017 ‘Steamworks’ e Células de Poder no jogo de FRC de 2020 ‘Infinite Recharge’. | Link |
| Bolas Grandes | Um exemplo fenomenal de indexação de bolas grandes é do robô do time 254 para o jogo de FRC de 2014 ‘Aerial Assist’. Indexação, mesmo não necessária, permitiu o time 254 ter uma vantagem excelente no modo Autônomo. | Link |
| Cubos | Cubos não necessariamente requerem indexação (como os Cubos de Poder no jogo de FRC de 2018 ‘Power Up’), mesmo assim alguns times têm planejado mecanismos encadeando o intake ao mecanismo de pontuação. Porém, outros jogos como o jogo de FTC de 2017-18 ‘Relic Recovery’ de fato precisou que os Glifos fossem indexados, já que a ordem dos cubos era levada em consideração na pontuação | Link |
| Frisbees/Anéis | Em ambos os jogos de FRC de 2013 ‘Ultimate Ascent’ e de FTC de 2020-21 ‘Ultimate Goal’, múltiplas peças de jogo podiam ser controladas por um robô, tanto que a peça de jogo, um frisbee e um anel, respectivamente, precisavam de indexação. | Link |
| Caixas e Latas | Caixas no jogo de FRC de 2015 ‘Recycle Rush’ tinham que ser indexadas para que elas pudessem ser empilhadas em cima uma da outra para maximizar a pontuação. | Link |
Elevadores
Em todas as competições de robótica, é quase garantido que você vai ter que levantar alguma coisa. Seja uma peça de jogo ou o próprio robô vai depender do jogo, mas há várias maneiras de conseguir levantar coisas.
| Tipo de elevador | Anotações | Link |
|---|---|---|
| Braço | Um braço é provavelmente uma das formas mais simples de tirar alguma coisa do chão, e é extremamente confiável se construído corretamente. Esta playlist possui exemplos de robôs com os mais variados tipos de braço, variando de um único eixo até de 4 barras duplamente reversível. Há vários designs para olhar e escolher! | Link |
| Elevador | Elevadores são um dos meios mais rápidos e fortes de levantar em competições de robótica. Eles são geralmente feitos de 2 estruturas que deslizam uma entre a outra para estender para cima, mantendo sua força e estabilidade. Há vários exemplos ótimos nessa playlist, de designs consideravelmente simples até designs super complexos com ajuste interno. | Link |
| Extensão linear | Extensões lineares são semelhantes a elevadores em sua função (um elevador é um tipo de extensão linear), porém elas podem ser mais ou menos complexas dependendo do design. Extensões pneumáticas simples que possuem 2 posições são bem simples, já um sistema ajustável pode ser extremamente complexo | Link |
| Combinação Braço + Elevador | Essa configuração pode ser escolhida quando há uma variação de alcance em particular desejável para completar uma ou mais missões de jogo com apenas um elevador. A combinação de dois mecanismos simples de elevador resulta em maior complexidade de software e engenharia, mas permite possibilidades únicas. | Link |
Anotação extra:
Há dois tipos principais de ajustes que podem ser aplicados a elevadores e extensões lineares, esses são:
- Cascata (levantamento por estágios)
- Contínuo (levantamento sem parada)
Elevadores cascata são ajustados de uma forma que todos os andares movem para cima simultaneamente, enquanto o elevador contínuo é ajustado para que o andar final vá para cima primeiro, depois o penúltimo e assim em diante. Depois voltam para baixo na ordem reversa.
Mais informações sobre ajuste de elevadores: https://www.slideshare.net/oregonfirst/firstfare-2012-manipulators
Atiradores
Atiradores têm sido um componente primário em competições de robótica desde o rascunho da bíblia. Um atirador tem um único objetivo: marcar pontos de jogo a uma distância. Inclusos separadamente dos atiradores de peças de jogo específicos estão os atiradores encapuzados, já que são um design geral que esteve sendo e pode ser usado para todos os tipos de bolas.
| Peças de jogo | Anotações | Link |
|---|---|---|
| Bolas pequenas | Bolas pequenas são bem mais leves e comumente estocadas em maior volume 9requerendo um atirador mais rápido que o de bolas médias ou grandes), assim sendo separados das bolas médias e grandes para esse mecanismo. Atirar uma quantidade grande de bolas é uma tarefa difícil na qual soluções envolvem um malabarismo entre capacidade de bolas, precisão de mira, tiros por segundo e outras funções em seu robô. | Link |
| Bolas médias | Bolas médias são frequentemente atiradas a uma razão menor que as bolas pequenas, e há vezes onde apenas uma pode ser controlada pelo robô por vez (jogo de FRC de 2016 ‘Stronghold’), o que o leva a designs diferentes daqueles que atiram um volume maior, necessário para as bolas pequenas. | Link |
| Bolas grandes | Bolas grandes têm sido atiradas em vários jogos antes de 2015, mas não têm retornado ainda. Há vários métodos de lançar projéteis grandes que podem ser vistos nas variedades de design dessa playlist | Link |
| Cubos | Cubos têm sido geralmente levantados e entregues pela maioria dos robôs, ainda assim alguns times resolveram esse desafio de design atirando peças de jogo em formato de cubo na área de pontuação | Link |
| Frisbees/anéis | Frisbees e anéis são semelhantes em formato e, portanto, são atirados de formas bastante semelhantes, como visto nos designs usados no jogo de FRC de 2013 e no gogo de FTC de 2020-21. | Link |
| Coisa-que-parece-uma-bala-Nerf | EU achei uma animação de um mecanismo que achei bem legal e ciei uma playlist inteira para ele. Quem sabe um dia nós estaremos atirando algum tipo de minhoca de espuma (macarrão de piscina???) | Link |
| Atiradores Encapuzados (não é uma peça de jogo, mas um tipo de atirador) | Essa playlist consiste de atiradores encapuzados robustos e bem planejados, que são usados para mudar o ângulo de saída de um projétil, permitindo pontuação de várias posições diferentes. | Link |
Para mais informações em designs de atiradores:
Escaladores
No FRC, é extremamente comum a condição final do jogo pedir algum tipo de escalada para alcançá-lo. Desde 2015, robôs tiveram que escalar cordas, barras, plataformas, e até fazer travessia por uma barra (jogo de 2020 para comparação) para alcançar a condição final. Cada tipo de escalada possui várias soluções a mesma, explicando assim a necessidade de uma playlist para cada tipo de escalada. Há também times que planejam e constroem mecanismos além do requerimento de um único robô, e ajudam outros robôs a carregá-los para atingir a condição final de jogo. Essas são escaladas auxiliadas (também chamadas escaladas amigas).
| Tipo de Escalada | Anotações | Link |
|---|---|---|
| Corda | Cordas foram usadas no jogo de FRC de 2017 ‘Steamworks’. Robôs tinham que escalar a corda para ativar um painel de pressão para atingir a condição final de jogo. | Link |
| Barra | Barras têm sido extensivamente usadas no FRC como um objeto no qual robôs precisam escalar para atingir a condição final de jogo. Desde 2015, barras foram parte das condições finais de jogo para o FRC em 2016, 2018, 2020 e 2021. | Link |
| Plataforma | A plataforma foi o maior obstáculo para robôs no jogo de FRC de 2019 ‘Destination Deep Space’. Robôs tinham 2 alturas diferentes que precisavam escalar para alcançar pontos diferentes. | Link |
| Barra Transversal | Nos jogos de FRC de 2020 e 2021 ‘Infinite Recharge’, uma condição final de jogo que garantia pontos extras, e potencialmente o pontapé necessário para ganhar os preciosos RP (Pontos de Ranking), era que a barra que o seu time tinha que escalar estivesse nivelada. Alguns times desenvolveram e construíram um robô que pudesse se deslocar ao longo da barra para nivelar com o robô do outro lado da barra e atingir o bônus da condição final do jogo. | Link |
| Auxiliada/Amiga | Alguns times no FRC foram ao infinito é além por anos para auxiliar sua aliança a alcançar o máximo número de pontos de condição final de jogo e/ou os preciosos RPs. Esses robôs têm sido projetados para levantar outros robôs acima de um limite para conquistarem o bônus da condição final de jogo. | Link |
Sem Categoria
Esses são mecanismos que não se encaixavam bem em nenhuma playlist acima, por serem diferentes demais dos outros mecanismos para serem agrupados juntos.
| Mecanismo | Anotações | Link |
|---|---|---|
| Torre | Essa playlist consiste majoritariamente de atiradores torre, que rodam separadamente da drivebase, permitindo que o robô mire no alvo sem precisar alinhar a drivebase ao alvo. Também inclui outros mecanismos torre como o robô do time 254 para o jogo de FRC de 2019 ‘Destination Deep Space’. | Link |
| Sucção | Mesmo sendo bastante raros, o poder de sucção e vácuo têm sido usados em várias competições de robótica, mais notavelmente o jogo de FRC de 2019 ‘Destination Deep Space’ para escalar a plataforma e controlar peças de jogo (com desempenho variado). | Link |
| Específico para o jogo | Há muitos jogos com uma mecânica específica que não iremos ver de novo. Esses requerem mecanismos específicos que não se encaixam em nenhuma outra categoria | Link |
| Mecanismos únicos | Esses são vídeos de mecanismos que não se encaixam em nenhuma outra playlist, mas são tão únicos que merecem sua própria playlist. | Link |
Livre tradução por: Maria Villaça (Mentora, times 5985 Project Bucephalus e 9050 Tucanus)
Fonte: www.projectb.net.au/resources/robot-mechanisms/
Autor original: Luin Mulvihill