
Buenos días robotista interesado…
English / Portuguese / Turkish / Spanish / Hebrew / French

Contenido: |
Este documento contiene enlaces a listas de reproducción de YouTube de vídeos con ejemplos de calidad y/o únicos de muchos tipos diferentes de mecanismos, principalmente de FIRST Robotics Competition (FRC), pero también de otras competiciones de robótica como FIRST Tech Challenge (FTC) y VEX. El título de cada página indica los mecanismos destacados con una breve descripción de su uso en las competiciones de robótica. La tabla debajo de cada título contiene la subcategoría del mecanismo (por ejemplo, diferentes tipos del mismo mecanismo, o diferentes piezas de juego), algunas notas sobre el tema, y un enlace a la lista de reproducción que contiene vídeos sobre ese mecanismo específico.
Actualizaré continuamente las listas de reproducción a medida que vaya surgiendo para ampliar la variedad y calidad de los diseños de los tu y tu equipo puedan aprender. Si tienes alguna sugerencia sobre categorías de listas de reproducción, ediciones, correcciones o preguntas, no dudes en enviarme un correo electrónico a pbmechanisms@gmail.com Espero que esto sea útil para ustedes y sus equipos, Luin – Mentor en el equipo FRC 5985 Project Bucephalus
Gracias a todos los que me han ayudado a editar y mejorar este documento para convertirlo en lo que es actualmente, se los agradezco enormemente. En especial a: |
Ejemplos de Elementos de Juego
En la siguiente tabla se detalla el tamaño y el aspecto general de determinadas piezas de juego con el fin de ofrecer una referencia para los mecanismos que le interesen.
| Elemento de Juego | Imagen de ejemplo | Categoría | Año de Juego | Fuente de imagen | ||||
|---|---|---|---|---|---|---|---|---|
| Pelotas Pequeñas <5” |  |
FRC | 2017 | AndyMark | ||||
| Pelotas Medianas 5”-10” |  |
FRC (L) FRC (R) |
2020 (L)
2016 (R) |
FIRST AndyMark |
||||
| Pelotas Grandes >10” | 
|
FRC (L) FRC (R) |
2019 (L)
2014 (R) |
FIRST
FIRST |
||||
| Cubos |
|
FRC (L)
VEX(R) |
2018 (L)
2019-20 (R) |
MindGear | ||||
| Frisbees – Discos y Anillos |
|
FTC (L) VEX (R) |
2019-20 2017-2018 |
FIRST | ||||
| Engranes | 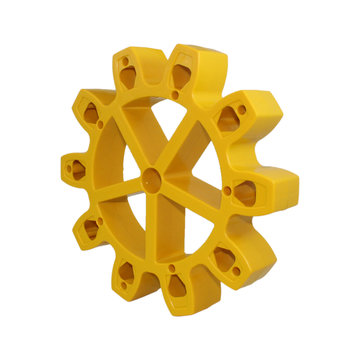 |
FRC | 2017 | AndyMark | ||||
| Postes |  |
FTC | 2019-20 | AndyMark | ||||
| Conos |  |
VEX | 2017-18 | VEX | ||||
| Contenedores (amariilos) y Botes (verde) |   |
FRC | 2015 | FIRST | ||||
| Camaras de Aire | FRC | 2011 | FIRST | |||||
| Otro |  |
FRC | 2019 | AndyMark | ||||







Transmisiones
La transmisión es la parte más importante de un robot, ya que te permite al menos jugar a la defensiva y empujar las piezas del juego hacia tu equipo. Sin él, no podrías conducir a ningún lugar del campo. El chasis que viene con el kit de partes para los equipos FRC es bastante fiable, sin embargo, para lograr ciertos objetivos de diseño, los equipos pueden necesitar utilizar un chasis diferente o diseñar el suyo propio.
| Tipo de chasis | Notas | Link |
|---|---|---|
| West Coast Drive | El chasis West Coast Drive (WCD) es el chasis “personalizado” más común en FRC. Suele constar de 6 ruedas en voladizo desde el chasis y proporciona una gran potencia de empuje. Las ruedas en voladizo permiten más espacio interno en el robot para los mecanismos, configuraciones más flexibles y un mejor mantenimiento. | Link |
| Mecanum | El chasis compuesto por llantas mecanum es bastante habitual en competiciones de robótica con robots más pequeños como FTC y VEX, donde la defensa no es un componente tan esencial del juego. Permite el movimiento multidireccional con 4 ruedas especializadas que tienen rodillos independientes en ángulo que giran libremente. La potencia de empuje se pierde con este tipo de transmisión, lo que te hace extremadamente expuesto a la defensa. Equipos como FRC 1986 intentaron combatir esta situación utilizando 8 ruedas mecanum. Para sacar el máximo partido a este tipo de tracción, los pilotos (drivers) deben ser hábiles y las trayectorias autónomas deben elegirse cuidadosamente para poder obtener el mejor rendimiento de este tipo de chasis. | Link |
| Swerve | La transmisión Swerve es un tipo de transmisión compleja en el que las ruedas no sólo giran para propulsar el robot, sino que también pueden pivotar independientemente unas de otras sobre el terreno. Esto permite que un robot siga manteniendo gran parte de la potencia de empuje de un WCD, al tiempo que es capaz de producir un movimiento multidireccional. Existen opciones COTS (Commercial Off The Shelf(Artículos de proveedores disponibles para comprar)) de varios proveedores de FRC, y se dispone de algunos códigos de ejemplo, pero el swerve sigue siendo una inversión costosa y prolongada para un equipo de FRC. Para sacar el máximo partido a este tipo de accionamiento, los pilotos (drivers) deben ser hábiles y las trayectorias autónomas deben elegirse cuidadosamente para poder obtener el mejor rendimiento de este tipo de chasis. | Link |
| H Drive | El H Drive es un tipo especial de transmisión que utiliza la mecánica de una rueda Omnidireccional que consiste en rodillos que giran libremente perpendiculares a la dirección de rotación de todas las ruedas. Esto significa que con 5 ruedas omni en una configuración H permite el movimiento multidireccional, lo que permite desplazarse de manera lateral a expensas de la potencia de empuje (si pueden alcanzarte). Los pilotos deben ser hábiles para sacar el máximo partido a este tipo de chasis. | Link |
| Other Holonomic | Holonomic es el nombre colectivo que reciben las transmisiones que pueden moverse en varias direcciones sin tener que girar físicamente el chasis del robot. Por ejemplo, conducir hacia delante y luego hacia la izquierda, sin cambiar la dirección de la parte delantera del robot. Otras transmisiones holonómicas son el Kiwi Drive, el Butterfly Drive y el Differential Swerve Drive. | Link |
| Obstacle Overcoming | En los juegos de FRC de 2010 y 2016, había obstáculos en el campo que a veces requerían un tipo especial de transmisión para ayudar a superarlos. | Link |
| Cepillo de alambre | En el juego FRC de 2002, los equipos podían ganar puntos empujando porterías móviles hacia el lado de la alianza contraria. El equipo 71 utilizó cepillos de alambre para caminar/marchar por el campo con las bandas de rodadura moviéndose de forma similar a una máquina elíptica. Sin embargo, dicha técnica es ilegal y está inmortalizada bajo la regla “Los dispositivos de tracción no deben tener características superficiales que puedan dañar ARENA (por ejemplo, metal, papel de lija, tacos de plástico duro, tacos, cierres de gancho o accesorios similares)”. | Link |
| Sin Transmisión | Generalmente no es factible | Link |
Mecanismos de recogida
Los mecanismos de recogida son mecanismos son el mecanismo de un robot diseñado para adquirir la/s pieza de juego del campo. Suele ser el segundo mecanismo más común en un robot porque en casi todas las competiciones habrá algo que tu robot tendrá que coger y manipular.
| Elementos de Juego | Notas | Link |
|---|---|---|
| Pelotas Pequeñas y Medianas | Bu tür oyun parçalarını almak için benzer toplama mekanizmaları kullanıldığından küçük ve orta toplar birlikte kulllanılmıştır. | Link |
| Pelotas Grandes | Las pelotas grandes tienen su propia lista de reproducción, ya que suelen comportarse de forma diferente a las pelotas pequeñas y medianas y, por lo tanto, requieren su propio mecanismo de obtención. | Link |
| Cubos | Los cubos son bastante comunes y se han visto a través de diferentes competencias de robótica en los últimos años, más notablemente en el juego FRC 2018 ‘Power Up’. | Link |
| Frisbees (Discos)/Anillos | Frisbees (Discos) y los anillos se comportan de forma similar y han sido manipulados de la misma manera (FRC 2013 vs FTC 2020-21). | Link |
| Hatch Panels (Paneles Circulares) | Los Hatch panels son un elemento de juego único y por ende requiere su propia lista de reproducción | Link |
| Engranes | Los engranes (el elemento de juego de FRC en 2017) son de igual manera un elemento de juego extremadamente único y por ende también requiere su propia lista de reproducción, sin embargo, algo de los métodos de recolección puedan ser aplicado a objetos como frisbees, anillos, y hatch panels. | Link |
| Postes | Los postes se han visto recientemente solamente en FTC 2020-21 en la portería tambaleante de elementos de juego. | Link |
| Conos | Los conos son el elemento de juego primario en el reto de la VEX Robotics Competition de 2018 – “In the Zone” (en la zona). En los años 2022 y 2023 de FTC y 2023 de FRC, el cono como elemento de juego también se utilizó siendo en FTC de plástico duro con una base redonda mientras que en FRC este tenía una semejanza con cono pequeño de vialidad. | Link |
| Contenedores y Botes | Estos fueron los elementos de juego en 2015 en el juego de FRC ‘Recycle Rush’. La naturaleza única de estos elementos de juego obtuvieron su propia lista de reproducción. | Link |
| Camaras de Aire | Las cámaras de aire, que se han visto en numerosos juegos del FRC, reaparecerán en el futuro. | Link |
Indexadores
Los indexadores son mecanismos utilizados para manipular las piezas del juego una vez que ya están bajo el control del robot. Esto podría consistir en ordenar las piezas de juego o trasladarlas a otro mecanismo, como un disparador u otro sistema de puntuación.
|
Elementos de Juego |
Notar | Link |
|---|---|---|
| Pelotas Pequeñas y Medianas | Por lo general, las pelotas pequeñas y medianas reciben el mismo tratamiento en lo que respecta a la indexación. Cuando un robot puede controlar varios elementos de juego, la indexación es necesaria para mover las pelotas hasta el mecanismo de puntuación. Históricamente, las pelotas pequeñas y medianas se han indexado de forma similar. Por ejemplo: Balones de Baloncesto en el juego FRC de 2012 ‘Rebound Rumble’, Combustible en el juego de 2017 ‘Steamworks’ y Células de Energía en el juego de 2020 y 2021 ‘Infinite Recharge’. |
Link |
| Pelotas Grandes | Un ejemplo fenomenal de indexación de pelotas grandes es el robot del equipo 254 para el juego FRC de 2014 ‘Aerial Assist’. La indexación, aunque no es obligatoria en absoluto para este reto, permitió a 254 tener una excelente ventaja en el periodo Autónomo. | Link |
| Cubos | Los cubos no requieren necesariamente indexación (como los Power Cubos en el juego FRC de 2018 ‘Power up’), aunque algunos equipos han diseñado mecanismos con un “soltador” desde la recolección hasta el mecanismo de anotación. Sin embargo, otros juegos como el juego FTC 2017-18 ‘Relic Recovery’ sí requerían que los Glifos estuvieran indexados, ya que el orden de los cubos era necesario para puntuar. |
Link |
| Frisbees (Discos)/ Anillos | Tanto en el juego FRC 2013 ‘Ultimate Ascent’ como en el juego FTC 2020-21 ‘Ultimate Goal’, múltiples elementos de juego podían ser controladas por un robot, lo que significaba que la pieza de juego, un frisbee y un anillo respectivamente, requerían indexación. | Link |
| Contenedores y Botes | Los contenedores del juego “Recycle Rush” de FRC del 2015 tenían que estar indexados para poder apilarlos uno encima de otro para de esta manera maximizar la puntuación. | Link |
Elevadores
En todas las competiciones de robótica, está casi garantizado que tendrás que levantar algo. Sin importar que sea un elemento de juego o tu propio robot depende del juego, pero hay múltiples formas de levantar cosas.
| Tipo de Elevador | Notas | Link |
|---|---|---|
| Brazo | Un brazo es probablemente una de las formas más sencillas de hacer despegar algo del suelo, y es extremadamente fiable cuando se construye correctamente. Esta lista de reproducción contiene ejemplos de robots con todo tipo de brazos, desde los de un solo eje hasta los de cuatro barras reversibles. Hay muchos diseños entre los que elegir! | Link |
| Elevador | Los elevadores son una de las formas más rápidas y fuertes de elevarse en las competencias de robótica. Suelen estar formados por dos estructuras que se deslizan entre sí para extenderse hacia arriba sin dejar de ser fuertes y estables. En esta lista de reproducción hay muchos ejemplos fantásticos, desde diseños de elevadores bastante sencillos hasta diseños super complejos con diversos componentes internos. |
Link |
| Extensión Linear | Las extensiones lineales son similares a los elevadores en su función (un elevador es un tipo de extensión lineal), pero pueden ser más o menos complejas en función del diseño. Las extensiones neumáticas simples que tienen 2 posiciones son bastante sencillas, mientras que un sistema amañado podría ser extremadamente complejo. | Link |
| Combinación Brazo + Elevador o Pink Arm (Brazo Rosa) | Esta configuración puede elegirse cuando se desea una determinada amplitud de movimiento para completar una o varias tareas de juego con un elevador. La combinación de dos mecanismos de elevación sencillos conlleva una mayor complejidad de software y de ingeniería, pero permite posibilidades muy singulares. | Link |
Nota Extra:
Existen dos tipos principales de aparejos que pueden aplicarse a los elevadores y extensiones lineales, estos son:
- Cascada
- Continuo
Los elevadores en cascada se instalan de forma que todas las etapas suben simultáneamente, mientras que los elevadores continuos se instalan de forma que la última etapa sube primero, luego la penúltima y así sucesivamente. Luego vuelven a bajar en el orden inverso.
Más información sobre elevadores:
https://www.slideshare.net/oregonfirst/firstfare-2012-manipulators
Disparadores
Los disparadores han sido un componente esencial de las competencias de robótica desde que éstas existen. Los disparadores tienen un propósito fundamental: anotar elementos de juego a distancia. Los disparadores se incluyen por separado de los mecanismos de disparo específicos de otros elementos de juego, debido a que son un diseño general que se ha utilizado y se puede utilizar para pelotas de todos los tamaños.
|
Elementos de Juego |
Notas | Link |
|---|---|---|
| Pelotas | Las pelotas pequeñas son más ligeras y suelen tener un volumen mayor (lo que requiere un disparador más rápido que las pelotas medianas o grandes), por lo que se han separado de las pelotas medianas para este mecanismo. Disparar grandes cantidades de pelotas es un reto difícil cuyas soluciones implican compromisos entre la capacidad de las bolas, la precisión de disparo, los disparos por segundo y las demás funciones de tu robot. | Link |
| Pelotas Medianas | Las pelotas medianas suelen dispararse con menor cadencia de tiro que las pelotas pequeñas y, a veces, un robot sólo puede controlar una a la vez (juego “Stronghold” de FRC del 2016), lo que se presta a diseños diferentes al de los disparadores de mayor volumen necesarios para las pelotas pequeñas. | Link |
|
Pelotas Grandes |
Las pelotas grandes se han disparado en muchos juegos anteriores a 2015, pero aún no han vuelto. Hay muchos enfoques para disparar proyectiles grandes, que se pueden ver en la variedad de diseños de la lista de reproducción. | Link |
| Cubos | Por lo general, la mayoría de los robots han levantado y entregado los cubos, sin embargo, un pocos equipos han resuelto el reto de diseño de disparar cubos a la zona de puntuación. | Link |
|
Frisbees (Discos)/ Anillos |
Los frisbees y los aros tienen ambos una forma similar y, por lo tanto, se disparan de forma extremadamente parecida, como se ve en los diseños utilizados en el juego FRC de 2013 y en el juego FTC de 2020-21. | Link |
| Buscador de Dardos Tipo NERF | Encontré una animación de un mecanismo que me pareció genial y le añadí una lista de reproducción entera. Quién sabe, puede que algún día lancemos tubos de espuma de algún tipo (¿churros de alberca????). | Link |
| Disparadores Encapuchados (No son un elemento de juego, pero un tipo de disparador) | Esta lista de reproducción consiste en disparadores encapuchados bien diseñados y robustos, los cuales son usados para ajustar el ángulo de salida del disparador para poder disparar en múltiples posiciones. | Link |
Para más información sobre el diseño de disparadores:
- fundamentos de volantes de inercia para disparadores de zachary jj para diseñadores y prototipadores
Escaladores
En FRC, es extremadamente común que en la fase final de la partida se requiera una escalada de algún tipo. En los años transcurridos desde 2015, los robots han tenido que trepar por cuerdas, barras, plataformas y, a veces, incluso a través de un barra (juego FRC 2020 para mantener el nivel) para cumplir la condición. Cada tipo de escalada tiene muchas soluciones, de ahí la necesidad de una lista de reproducción para cada tipo de escalada. También hay equipos que diseñan y construyen mecanismos de escalada que van más allá del requisito de un solo robot, y ayudan a otros robots o llevan otro/s robot/s con ellos para cumplir la condición del final de la partida. Estas son las subidas asistidas (también llamadas subidas de compañeros).
| Tipo de Escalada de Final De Partido | Notas | Link |
|---|---|---|
| Cuerda | Las cuerdas se utilizaron en el juego “Steamworks” del FRC de 2017. Los robots tenían que escalar la cuerda y activar una plataforma de presión para cumplir la condición final. | Link |
| Barra | Las barras se han utilizado mucho en el FRC como un objeto por el que los robots deben trepar para cumplir las condiciones de final de partida. Desde 2015, una barra ha formado parte de la escalada en la fase final del partido de FRC en 2016, 2018, 2020, 2021 y 2022. | Link |
| Plataforma | Una plataforma fue el principal obstáculo de la fase final del partido para los robots en el juego FRC 2019 ‘Deep Space’. Los robots tenían 2 alturas diferentes a las que podían subir para conseguir diferentes cantidades de puntos. | Link |
|
Barra Transversal |
En el juego de FRC de 2020 y 2021 “Infinite Recharge”, una condición de final de partida que proporcionaba puntos extra, y potencialmente el impulso necesario para ganar un preciado RP(Ranking Point (Punto Clasificatorio)), era que la barra de la que colgaba tu alianza tenía que estar nivelada. Algunos equipos diseñaron y construyeron un robot que podía desplazarse a lo largo de la barra con el fin de equilibrar al otro robot al otro lado de la barra para cumplir esa condición extra de final de partida. | Link |
|
Assistida/Compañero |
Algunos equipos de FRC han ido más allá a lo largo de los años para ayudar a su alianza a conseguir el máximo de puntos de final de partida y/o un preciado RP. Estos robots han sido diseñados para elevar a otros robots por encima de un umbral que permita cumplir la condición de bonificación de final de partida. | Link |
Algunos Fuera de las Categorías
Estos son mecanismos que no encajaban bien en una de las listas anteriores, ya que eran demasiado diferentes de otros mecanismos como para agruparlos con ellos.
| Mecanismo | Notas | Link |
|---|---|---|
| Torretas | Esta lista de reproducción se compone principalmente de disparadores con torretas, que giran por separado de la base motriz, lo que permite al robot apuntar al objetivo sin necesidad de alinear la base motriz con el objetivo. También incluye otros mecanismos mecanizados con torretas como el robot de 254 para la temporada FRC 2019 ‘Destination Deep Space’ | Link |
| Mecanismo Impulsado por Succión | Aunque es extremadamente raro, la succión y la potencia del vacío se han utilizado en algunas competencias de robótica, más notablemente en el juego FRC 2019 ‘Destination Deep Space’ para subir a la plataforma y controlar elementos de juego (con éxito variable). | Link |
| Específico del Juego | Hay muchos juegos que tienen mecánicas específicas que no hemos vuelto a ver. Estos requerían mecanismos específicos que no encajan en ninguna otra categoría. | Link |
| Mecanismos Únicos | Estos son vídeos de mecanismos que sí encajan en otras listas de reproducción, pero que son tan únicos que merecen la suya propia. | Link |